
Dolt is a SQL database that supports Git-like features, including branch, diff, merge, clone, push and pull. Dolt’s SQL functionality is built on top of a SQL engine written in Golang. We’ve previously blogged about our first steps in optimizing joins in go-mysql-server. With increasing adoption of Dolt as an OLTP database for online applications and as parts of OLAP workflows, we’ve seen real life queries leaning on, and pushing the bounds of, Dolt’s query optimizer. In this blog post, we highlight a few scaling bottlenecks our previous join optimization work ran into and recent improvements we’ve made to overcome them.
Overview#
As noted in the previous post introducing our first pass at 3+ table indexed join search, a major piece of Dolt’s query analyzer is a join search that tries to compute the best order in which to execute a series of joins within a query. The algorithm described there proceeds in two steps:
-
Find the lowest cost join order by taking into account table sizes and available indexes for the given join conditions. This is done by
orderTablesin the extracted code. -
Compute a tree of
IndexedJoinnodes where the leaves appear in the lowest cost order and the available indexes are used as intended.
As the capabilities of the engine grow and our users throw
increasingly complicated queries at it, they quickly realized that, as
presented, those two steps have some pretty intense assymptotics in
the number of tables being joined. In particular, step one visits
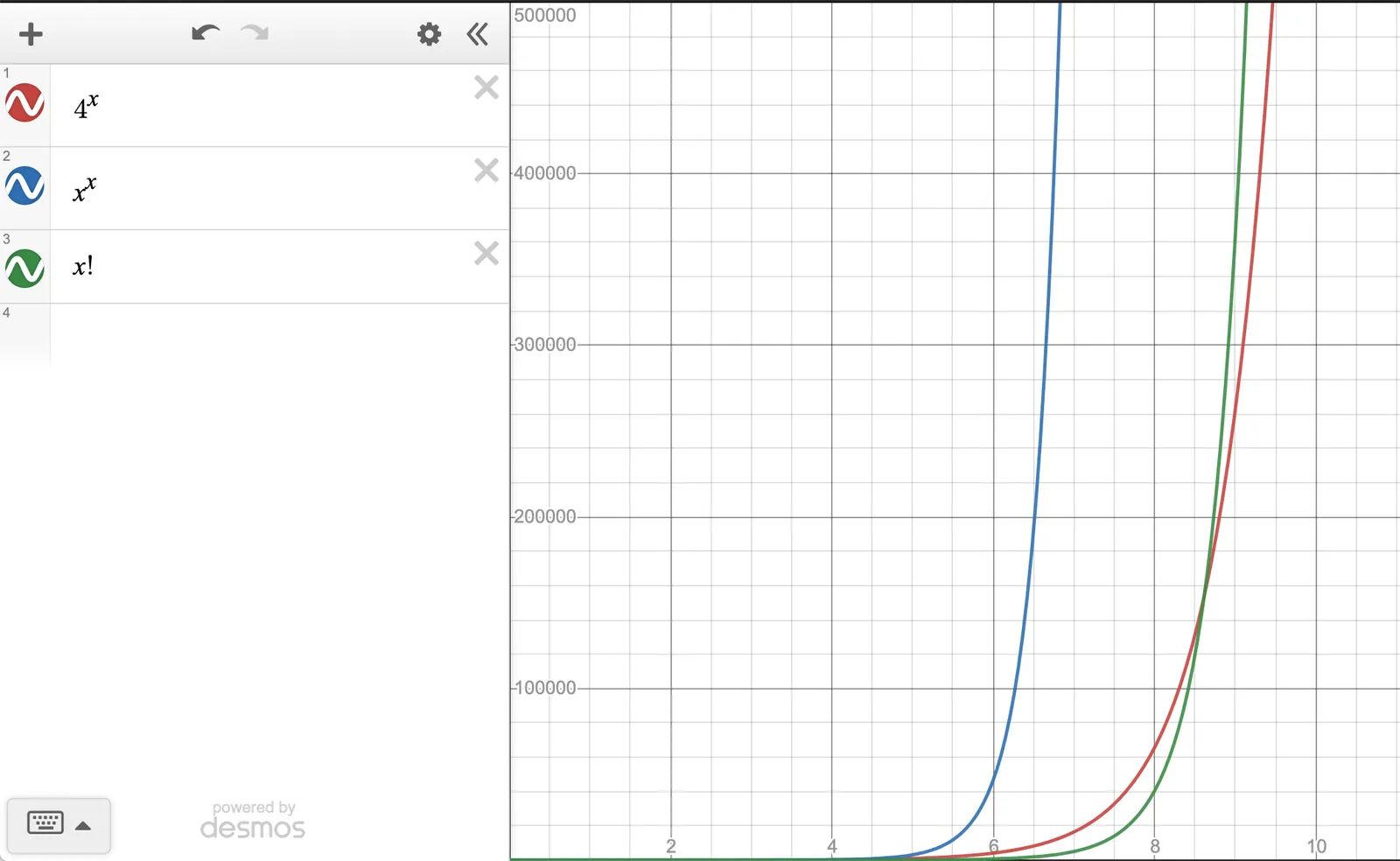
every possible permutation of the tables, which is O(n!). Step two,
which involved a naive recursive exhaustive search of every possible
tree, and checking if it happened to meet our preferred join order,
was O(n^n). Both of those factors need to be improved, but x^x is
particularly burdensome 🏋.
Because of how the search was implemented, the effective limit of how
many tables we could join in a single query was 6 or 7. That simply
wasn’t going to work for many useful queries. We set out to improve
our n^n factor in particular.
Knowing What You’re Looking For#
A basic optimization that was available in the previous join search implementation is that it generated and visited lots of join plans that did not match the desired table order that had already been calculated as being minimal cost. Those trees were never going to be accepted by the search, but there was no attempt to prune them early.
Generating every possible subtree and looking for one that matches your criteria is an easy to understand and implement approach, but in this case we could do a lot better with very minimal changes. The basic observation is, we don’t need to generate every possible join tree and take the first matching one. Instead, we can reduce our work by only generating every possible subtree that a priori matches the desired table order. The problem reduces to generating every possible complete binary tree and making the leaves of the binary tree the tables in the given order.
The recursive solution is pretty straightforward. Given a variant of
our joinSearchNode from before:
type joinSearchNode struct {
table string // empty if this is an internal node
left *joinSearchNode // nil if this is a leaf node
right *joinSearchNode // nil if this is a leaf node
}and a list of table names for the leaves tables []string. We can
construct our trees as follows:
func allJoinSearchTrees(tables []string) []joinSearchNode {
if len(tables) == 0 {
return nil
}
if len(tables) == 1 {
// A single table becomes a leaf.
return []joinSearchNode{joinSearchNode{table: tables[0]}}
}
var res []joinSearchNode
for i := 1; i < len(tables); i++ {
for _, left := range allJoinSearchTrees(tables[:i]) {
for _, right := range allJoinSearchTrees(tables[i:]) {
res = append(res, joinSearchNode{left: &left, right: &right})
}
}
}
return res
}Here we basically have two cases. If there is only a single table,
then the only possible tree is the tree with one node where that table
is the leaf. Otherwise, the solution is to treat each index into
tables as a location for a root node in the binary search tree and
compute all solutions with those nodes’ left and right children as
appropriate.
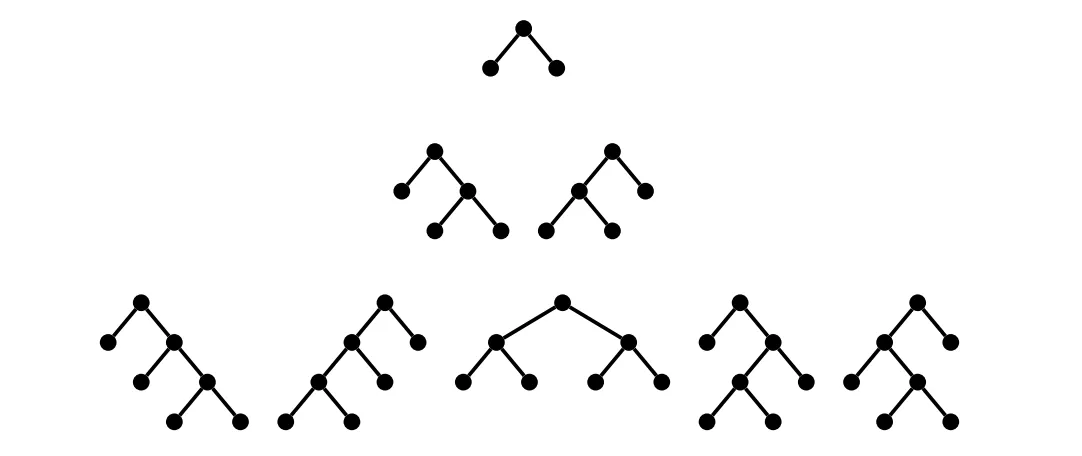
This recursive definition and the size of the result set is well
studied in combinatorics. Known as the Catalan
number, one of its
applications listed on Wikipedia is “the number of different ways n +
1 factors can be completely parenthesized”. That’s exactly what we’re
doing here: choosing the order in which we will apply successive
associative binary operators. The good news is that the Catalan number
sequence grows O(3^n), which is much better than our previous
n^n. It means that join tree construction is no longer the
bottleneck, and instead the cost optimization, where we naively pay
O(n!) considering every possible table ordering, is what we need to
optimize next.
Fixing Some Bugs While We’re Here#
While we were doing this performance work, we came across a bug in the previous join search code that we needed to fix. As outlined in the previous blog post, the prior search code would treat left and right joins as table ordering constraints, but its tree search was actually too liberal when it came to constructing the order for the joins. It had a bug where it would sometimes commute a left or right join with an inner join. In a sequence of inner joins, every join is commutable with every other join, but when left and right joins are involved, their children are not—they represent structural constraints on the resulting join tree. A left or right join’s children need to remain semantically equivalent in the resulting tree once the query plan is constructed.
Fixing this required us to change how we were representing ordering
and search constraints in our search above. Instead of passing in a
tables []string to our allJoinSearchTrees, we needed to pass an
actual representation of the structural constraints on the tree
itself. We ended up implementing our search around a new type:
type joinOrderNode struct {
associative []joinOrderNode
table string
left *joinOrderNode
right *joinOrderNode
}Here a node is either:
-
A leaf, with a non-empty
table. -
A structural constraint node, with non-nil
leftandright. -
A slice of
joinOrderNodesinassociative, in which case we will apply the parenthesization search as above.
Our parenthesization function just gets a little tweak for dealing with nodes of type (2), in which case it always inserts an internal node into the tree at that point.
func allJoinSearchTrees(node joinOrderNode) []joinSearchNode {
if node.table != "" {
return []joinSearchNode{joinSearchNode{table: node.table}}
}
var res []joinSearchNode
if node.left != nil {
for _, left := range allJoinSearchTrees(*node.left) {
for _, right := range allJoinSearchTrees(*node.right) {
res = append(res, joinSearchNode{left: &left, right: &right})
}
}
return res
}
if len(node.associative) == 1 {
return allJoinSearchTrees(node.associative[0])
}
for i := 1; i < len(node.associative); i++ {
for _, left := range allJoinSearchTrees(joinOrderNode{associative: node.associative[:i]}) {
for _, right := range allJoinSearchTrees(joinOrderNode{associative: node.associative[i:]}) {
res = append(res, joinSearchNode{left: &left, right: &right})
}
}
}
return res
}Results and Future Work#
Dolt went from struggling to analyze seven table joins to comfortably handling ten table joins without join order hints. By adding join order hints, the most expensive part of the search can be skipped, but the parenthesization search is still exponential and it starts slowing down noticeably at around fifteen tables. The end results is that a lot of practical queries for our users become much more performant.
We still have a lot of work to do on analyzer performance and the
execution performance of the resulting query plans—we went from
being dominated by O(n^n) factor to being dominated by the O(n!)
factor. We hope to add heuristics to our cost optimization search in
the future, so that we can reliably find compelling orders in which to
run a query without visiting all possible permutations of table
orders. The parenthesization search describe above can also still be
improved. It used to generate all possible join trees and it now
generates only the trees with the appropriate table order. But it can
also be changed to quickly backtrack when a tree that it is
constructing cannot meet the constraints that will be imposed by the
analyzer with regards to index utilization and join condition
evaluation. The quicker we can prune large subtrees in the search, the
less work will be wasted generating unusable results.
Overall we’re happy to get these improvements into our user’s hands, and we’re excited to keep delivering improvements in this space in the future.
Footnotes#
-
Courtesy of this very cool look at Catalan numbers. ↩